



















4. CONTROL OF VIX DRIVES 81
Go Home Command
The go home command (GH) is used to return to the reference home position. Issuing a GH
command will cause motion in a direction defined by the HOME configuration command.
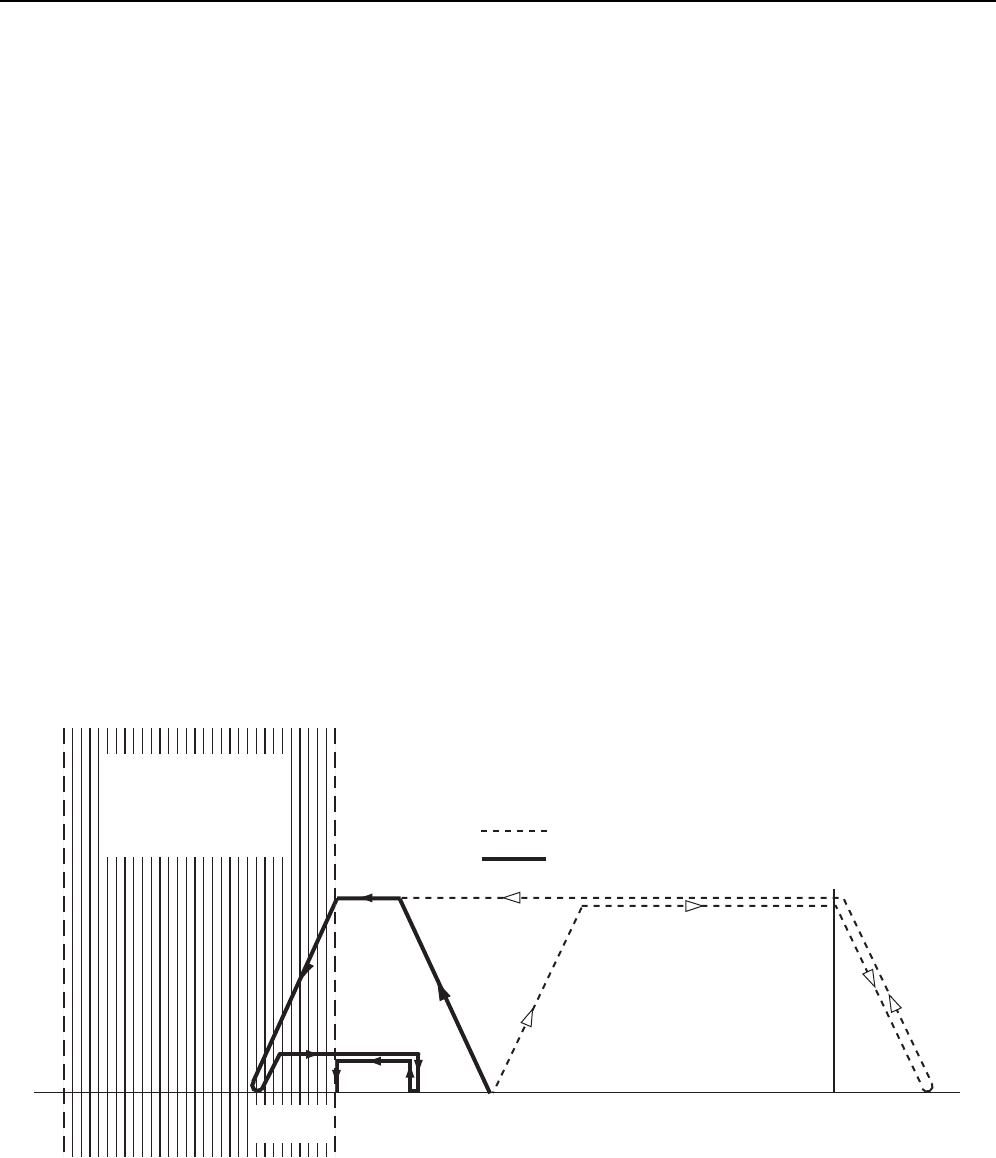
Figure 4-8 shows the path taken if motion was started between the positive edge of the
home switch and the positive limit (positive side of home). The dotted line represents
positive movement and the solid line negative, although once past the positive edge of the
home switch both merge to follow one common path. Positive movement results in motion
towards the positive limit, once the limit is hit motion is reversed* and finally heads for the
home switch. Negative motion will immediately head for the home switch.
*Note: Limit inputs must be enabled to allow a move to bounce off a limit.
Assuming home is the positive edge of the home switch, as soon as the edge is detected
motion is decelerated to a stop. Direction of travel is reversed and a distance is calculated to
move just outside the positive edge of the home switch. This new move is performed in a
positive direction. Again motion is stopped, and the direction of travel is reversed and a
negative approach is made at a fixed velocity determined by system variable HF. As soon
as the positive edge is again detected the motor is stopped.
Note: If the deceleration rate is set too low, the home switch operating range could be
travelled through before motion is brought to a stop. If this happens, a warning ‘home switch
too narrow’ will be reported, but homing will continue from the other side of the home switch
operating range.
POSITIVE
LIMIT
Start (from positive
side of home)
GH
GH
GH negative
GH positive
Positive
edge
HFrps
HOME SWITCH
OPERATING
RANGE
Finish
Figure 4-8. Go Home to Positive Edge