



















4. CONTROL OF VIX DRIVES 51
The conditions under which the FAULT label is called will vary depending upon the fault itself
and the condition of various other commands and command parameters. An exact
description is presented in Table 4-1. However, in general, a FAULT label will be called
given any one of the following conditions:
• An attempt to go home further onto a limit is made and the limit is enabled.
• An attempt to go further onto a limit is made with no fault label currently
running, the limit configuration is stop on limit and the limit is enabled.
• A limit is hit during motion and the move is not a go home, a fault label is not being
run, the limit configuration is stop on limit and the limit is enabled.
• A drive fault has occurred, but no drive programming is taking place.
• When it is called from a GOTO, GOSUB or LOOP command*.
*Note: in this case a FAULT has not actually occurred, consequently the FAULT label will be
called irrespective of the state of the ARM command.
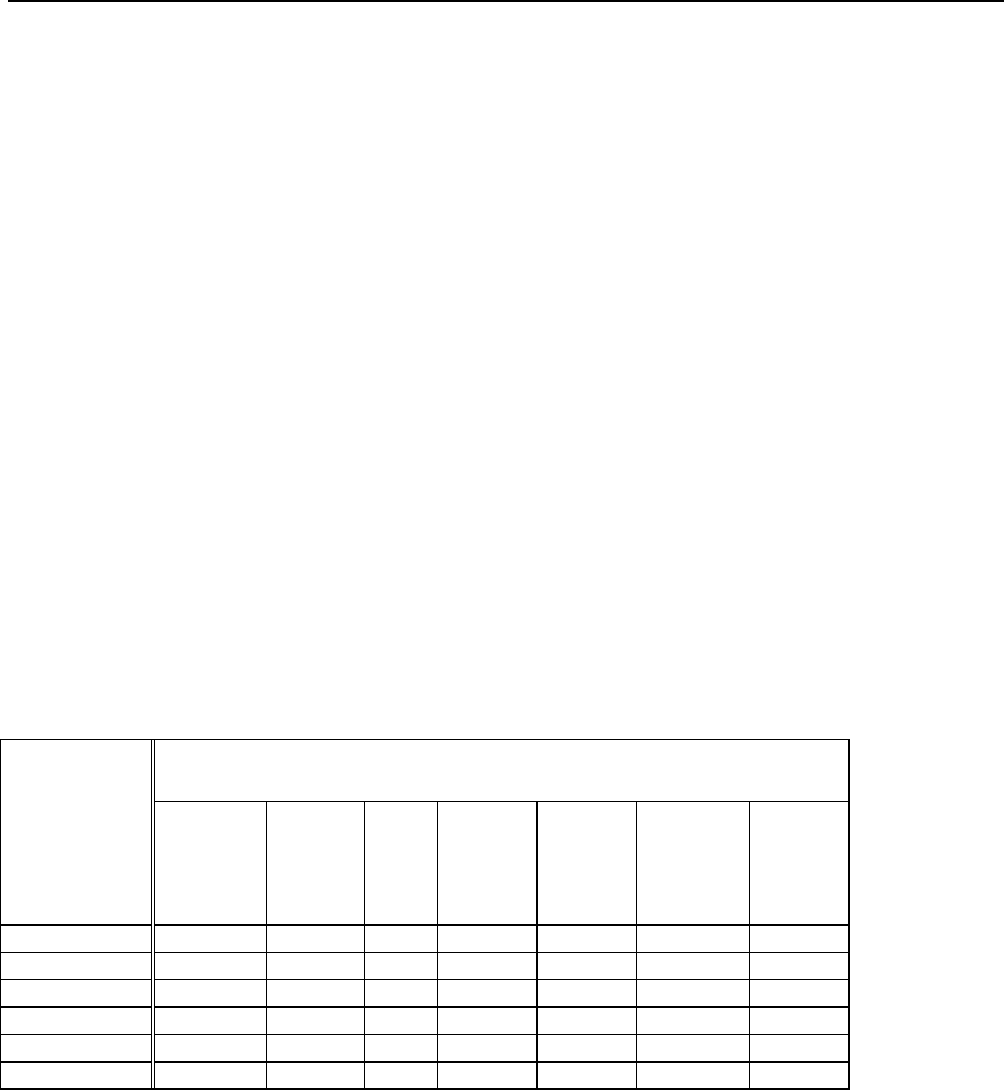
Table 4-1 summarises the conditions necessary for the FAULT label to be called. The
FAULT label will not be called when any one of the following conditions occur:
• There is an error whilst sending a command
• There is a general run time error with the program
• The program memory area becomes full
• A label is attempted to be run when it does not exist
• The transmit buffer or receive buffer suffer an overflow
Command & parameter conditions
Fault
Condition
FAULT
label
defined
Not
GH
Fault
ARM
bit
Limit is
enabled
Not
running
fault
label
Limit
decision
is stop
program
execution
Not
program
-ming
the drive
G onto a limit Y N/A Y Y Y Y N/A
Hit limit Y Y Y Y Y Y N/A
Drive fault Y N/A Y N/A N/A N/A Y
GOTO Y N/A N/A N/A N/A N/A Y
GOSUB Y N/A N/A N/A N/A N/A Y
LOOP Y N/A N/A N/A N/A N/A Y
Table 4-1. Conditions Required to Call a Fault Label