



















4. CONTROL OF VIX DRIVES 69
Drive Fault Byte Reporting
In exactly the same way as the status variable, the drive fault status can be reported a byte
at a time, using DFn within a read command.
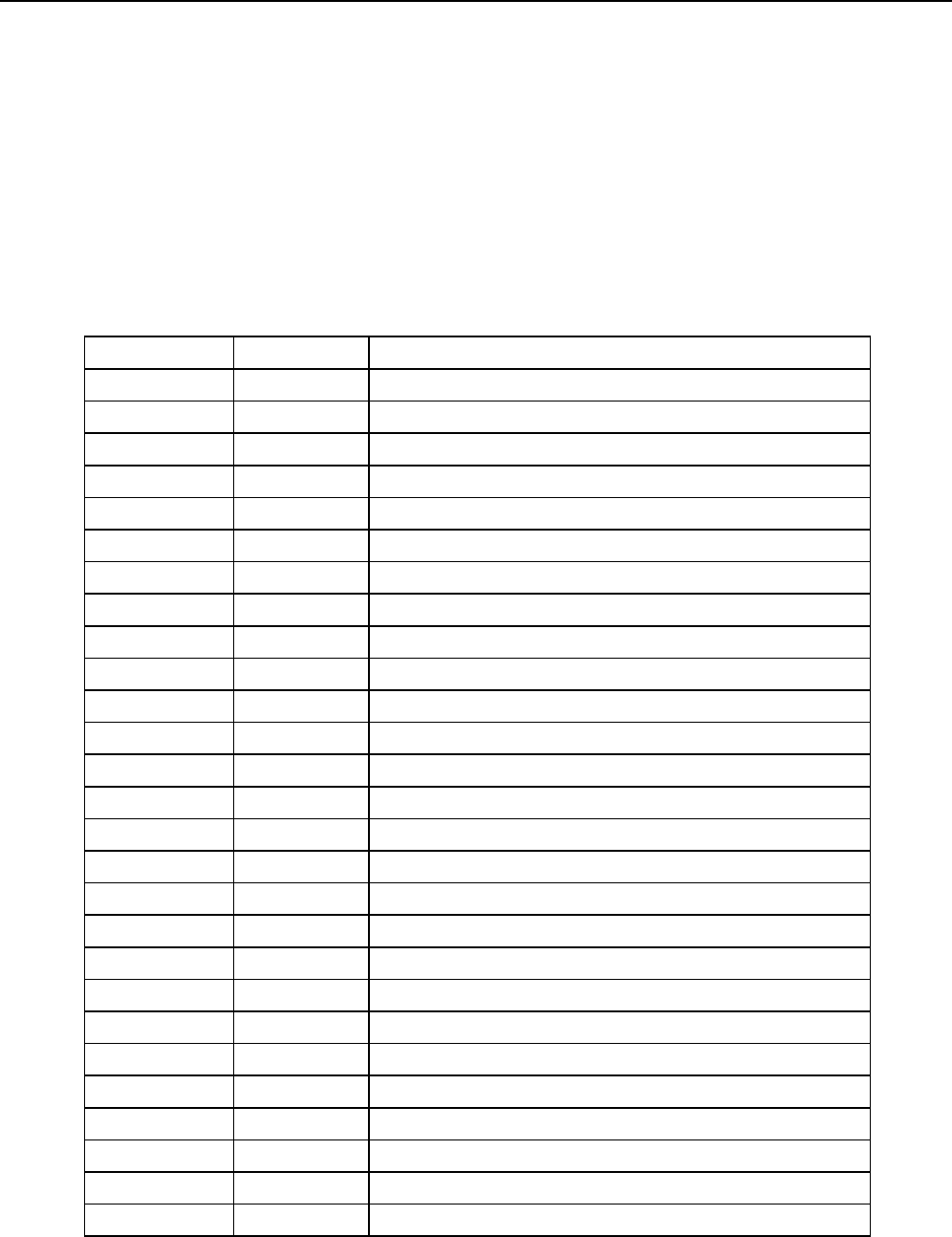
User Faults
User faults can be caused by programming errors, such as issuing a GO command when the
drive is de-energised. They are reported in a 32-bit word format the same as Drive Faults.
Performing a read UF command will report the current state of any User Faults listed in
Table 4-7.
Bit Number Bit Tested UF Information
1 UF 1.1 Value is out of range
2 UF 1.2 Incorrect command syntax
3 UF 1.3 Last label already in use
4 UF 1.4 Label of this name not defined
5 UF 1.5 Missing Z pulse when homing
6 UF 1.6 Homing failed - no signal detected
7 UF 1.7 Home signal too narrow
8 UF 1.8 Drive de-energised
9 UF 2.1 Cannot relate END statement to a label
10 UF 2.2 Program memory buffer full*
11 UF 2.3 No more motion profiles available
12 UF 2.4 No more sequence labels available
13 UF 2.5 End of travel limit hit
14 UF 2.6 Still moving
15 UF 2.7 Deceleration error
16 UF 2.8 Transmit buffer overflow
17 UF 3.1 User program nesting overflow
18 UF 3.2 Cannot use an undefined profile
19 UF 3.3 Drive not ready
22 UF 3.6 Save error
23 UF 3.7 Command not supported by this product
24 UF 3.8 Fieldbus error
25 UF 4.1 Input buffer overflow
26 UF 4.2 Reserved
27 UF 4.3 Command not actioned
28 UF 4.4 Scale distance is non-integer
29 to 32 UF 4.5/8 Reserved
Table 4-7. User Fault Bit Description
*sends an ASCII ‘bell’ character to indicate a buffer overflow condition.