



















4. CONTROL OF VIX DRIVES 87
Using Closed Loop Operation
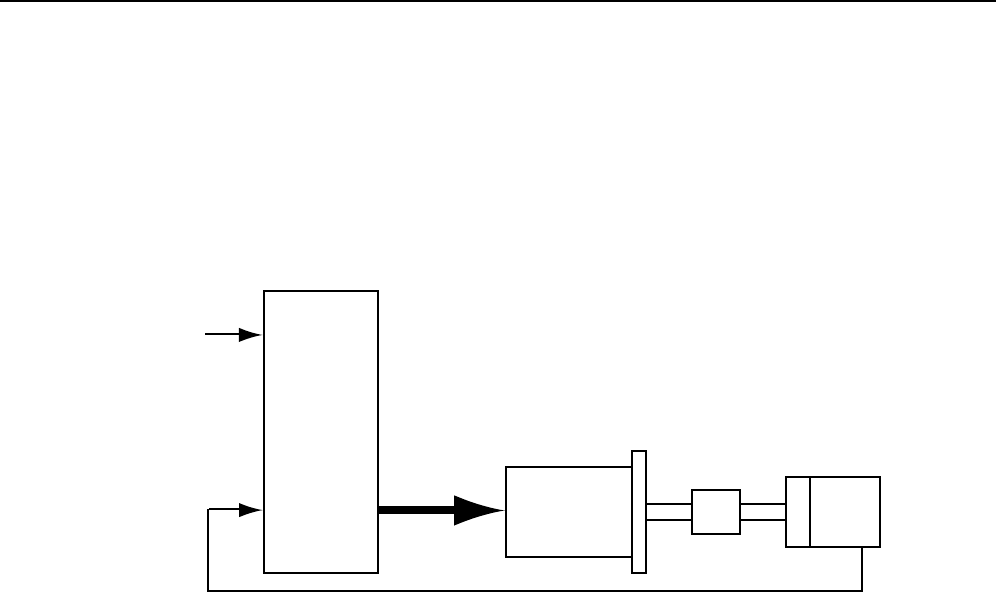
Closed loop refers to the operation of a stepper motor/drive where the position of the stepper
motor shaft is measured and compared with the commanded position. This is normally
arranged using an encoder attached to the motor’s shaft and electrically connected to the
stepper drive’s encoder input, as shown in Figure 4-12.
Stepper drive
Position
demand
Stepper motor
Coupling
Encoder
Figure 4-12. Closed Loop Operation
Closed loop operation is normally used in applications where a motor stall must be detected
(stall detect) or where a known position of the motor shaft must be maintained within known
limits (position maintenance).
Encoder Setup
To operate in closed-loop mode a motor- or load-mounted encoder must be connected to the
primary encoder input X2 and firmly attached to the motor shaft.
When using a motor mounted encoder set motor resolution in the MOTOR command equal
to the post-quadrature encoder counts per rev. See Scaling at the end of this section.
When using a load mounted encoder set the system variable EM equal to the post-
quadrature encoder counts per rev. See Scaling at the end of this section.
With LOADENC on (load-mounted encoder), distance is commanded in load encoder steps.
With LOADENC off (motor-mounted encoder) distance is commanded in motor encoder
steps.
Note: Post quadrature resolution is a hardware technique for increasing encoder resolution
by a factor of 4, consequently an encoder with a 250 line count will have 1000 counts per
revolution.
For a correctly connected system, entering a positive distance value should cause the motor
shaft to rotate in a CW (Clock Wise) direction when viewed from the shaft end and should
cause the encoder count to increase in a positive direction. The encoder can be checked by
entering a positive distance value (D) and noting the direction travelled by the motor shaft.
Then de-energise the motor (using the OFF command) and read the current encoder