



















4. CONTROL OF VIX DRIVES 77
Once a valid registration mark has been detected the registration move is performed using
the move parameters taken from the previously defined profile* (profile_number in the
command parameters). At the end of the registration move the user program GOSUBs to
the code immediately following the REG label. If no registration mark is detected, the
standard move profile completes and the user program GOSUBs to the code immediately
following the NOREG label.
* Registration will always occur in the current move direction. If the direction in the defined
profile is different to the current move direction, the direction information in the defined profile
is ignored.
An optional output can be programmed to indicate that a move that has been armed is ready
for registration. This would normally be after the move has started or after the hold-off
distance (if defined). The output chosen must be within the range of allowable
outputs (0 to 3). The default value is 0 (no output).
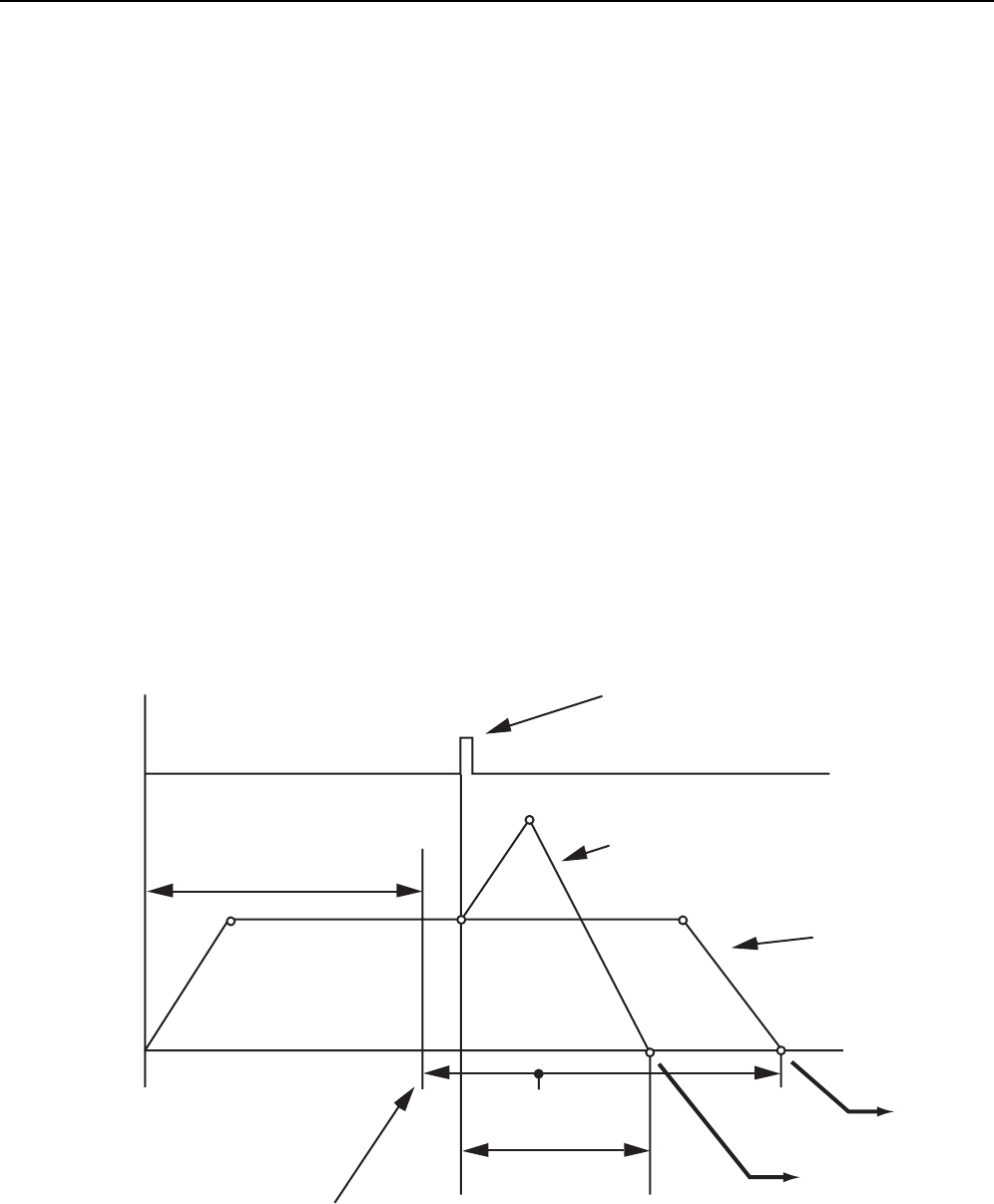
If the REG move must immediately begin to decelerate to achieve the distance programmed,
the REG profile is not configured correctly and the deceleration rate used will not be the
requested rate. In this case, the registration move may appear to be performed, but the
NOREG label is executed.
HOLD OFF DISTANCE
REGISTRATION MARK
ENCOUNTERED
REGISTRATION MOVE
(PROFILE NUMBER)
Fast
status
input
VELOCITY
START
PATH IF NO MARK
REGISTRATION
DISTANCE
REGISTRATION
WINDOW
HOLD OFF COMPLETE
NOREG
REG
Figure 4-6. Registration Move Profile