



















4. CONTROL OF VIX DRIVES 75
Motor Direction & Positive Motion
A positive direction command usually produces clockwise (CW) rotation of the motor shaft
when viewed from the shaft end*.
However, when limit switches are used it is important that the positive direction produces
motion towards the positive limit switch (see sub-section on HOMING). If this is not the
case, interchange the motor connections to A+ and A- to reverse motor direction.
* In practice this depends on internal motor wiring which varies between motor
manufacturers.
Motion Profiles
In any motion control application the most important requirement is precise, controlled shaft
rotation, whether it be with respect to position, time or velocity. This pattern of movement is
called a Motion Profile. Generally, such a profile can be represented graphically in the form
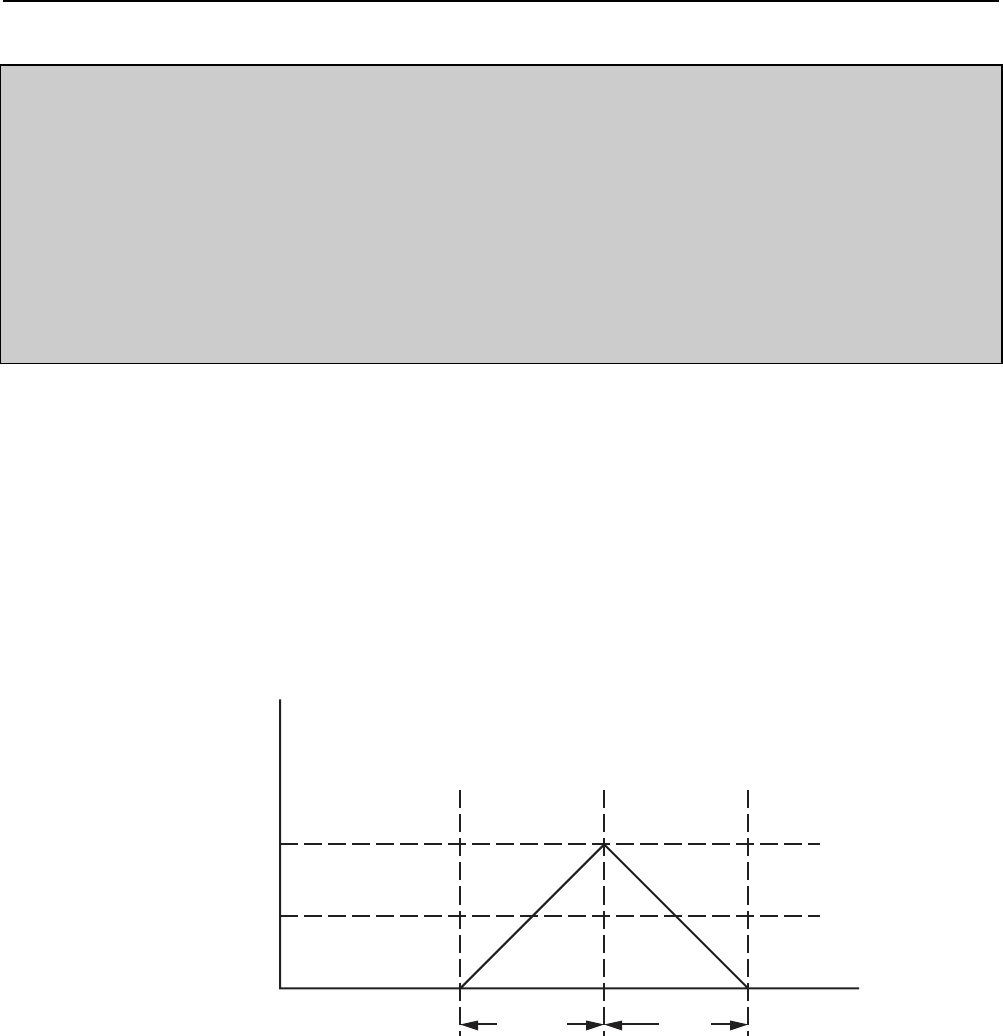
of a diagram of time or distance moved plotted against velocity. For example, the triangular
shaped profile shown in Figure 4-4 would be obtained if you programmed either a very low
acceleration or a very high velocity or both over a relatively short distance.
Triangular Profile
Velocity
ta=Accel td=Decel
Time, seconds
Vmax
Vavg
(= 0.5 Vmax)
(revs/sec)
2
1
0
01 2 34
Figure 4-4. Triangular Profile
Setting the acceleration to 1 rev/sec
2
with the velocity set to 5 revs/sec over a distance of
16000 steps (4 revs), a triangular motion profile will result. This is because by the time the
motor shaft has reached a velocity of 2 revs/sec, it will also have travelled half of the defined
distance due to the acceleration setting of 1 rev/sec
2
.