



















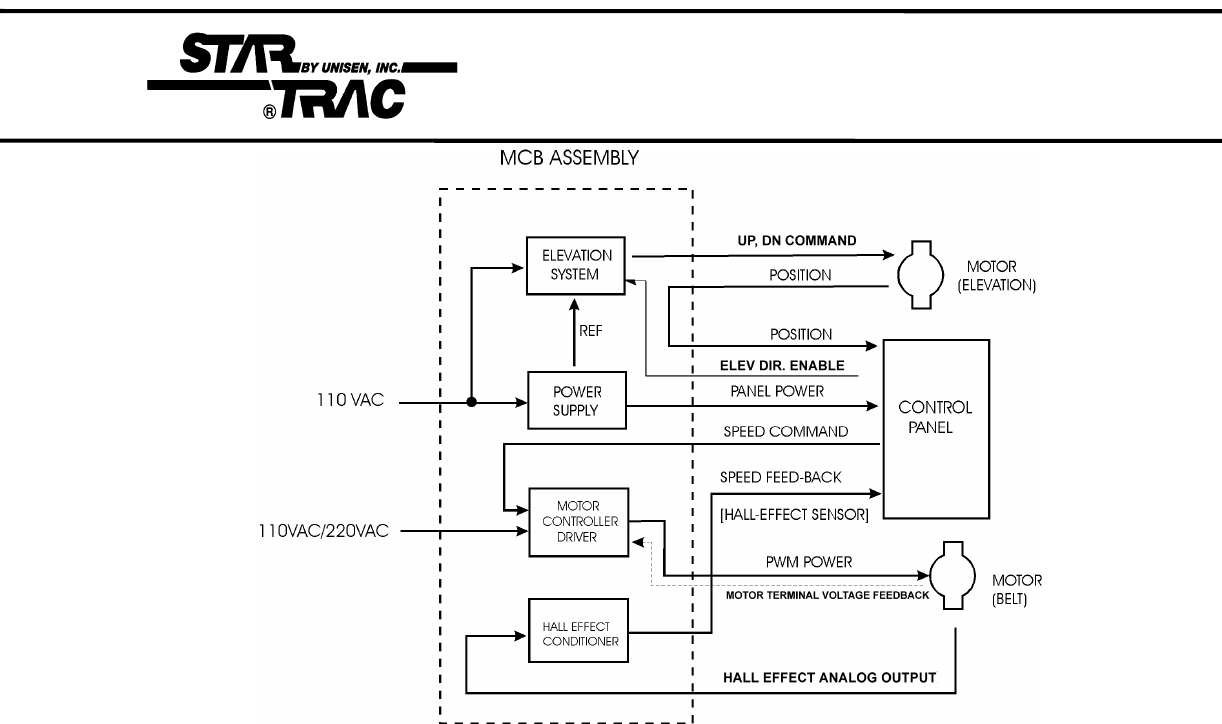
Treadmill Overview
• DC POWER SUPPLY
The MCB provides power to the display assembly. Establishes a reference voltage
and potentiameter position from the elevation motor
• RUNNING BELT MOTOR DRIVE CONTROL
Takes Alternating Current and converts it to Pulse Width Modulation
(PWM) to power the Drive Motor.
Motor voltage feedback and control-speed-commands determine the level
of PWM power delivered to the motor.
Motor Control circuits include fault sensing and safety functions.
• TACHOMETER SIGNAL CONDITIONING
The signal from the RPM sensor is fed to signal conditioning circuits on the MCB, where the signal is
converted to a digital output that is utilized by the Display Assembly to indicate belt speed.
• ELEVATION MOTOR CONTROL
The elevation circuit on the MCB receives elevation direction and enable
information from the Display Assembly, using these signals to provide
control to the Elevation Motor. Elevation position information, in turn, is
fed to the Display Assembly to indicate percent of incline.
1.5