25
Limitorque MX DeviceNet Field Unit FCD LMENIM2328-00 – 11/05
flowserve.com
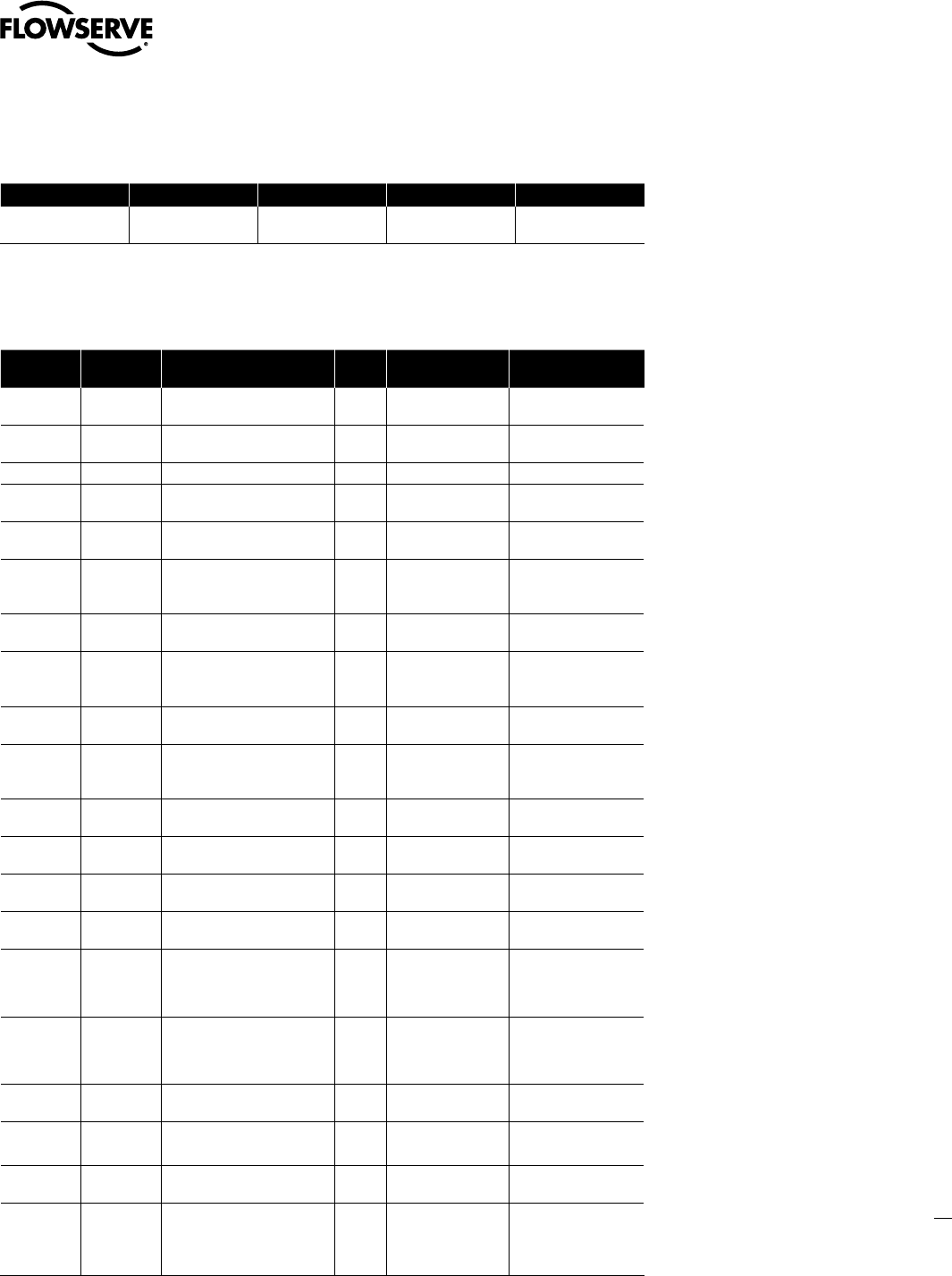
4.2.14 DI_Actuator_Faults_3_Chan
Table 4.30
Bit 7 – Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Reserved Low Battery
Indication
Interboard
Power Fault
Interboard
Communication Fault
Limiguard Fault
4.3 Channel Interface Object
Table 4.31
Attribute ID Access Rule Name
Data
Type
Description of
Attribute
Semantics of Value
1 RW AO_Crtl_Valve_ Flow_Chan INT Desired valve
position
Range 0 - 1000
2 RO DI_Position_And_
Bus_Mode_Chan
BYTE Valve Status and
Control Mode
Section 4.2.1
3 RO DI_Position_ Chan BYTE Valve Status Section 4.2.2
4 RO DI_actuator_ Faults_1_Chan BYTE Mechanical and
electrical faults 1
Section 4.2.3
5 RO DI_actuator_ Faults_2_Chan BYTE Mechanical and
electrical faults 2
Section 4.2.4
6 RO DI_Actuator_ Alarms_Chan BYTE Emergency shut-
down and inhibit
information
Section 4.2.5
7 RO DI_Disc_ User_Input_Chan BYTE Discrete input from
user
Section 4.2.6
8 RO DI_Read_Disc_ Output_Chan BYTE Monitor state of
relay Discrete
outputs
Section 4.2.7
9 RW DO_Position_ Chan BYTE Command
Stop/Open/Close
Section 4.2.8
10 RO DO_ESD_ Chan BOOL Command
Emergency
ShutDown
Section 4.2.9
11 RW DO_Relay_ Chan BYTE Command Energize
relays
Section 4.2.10
12 RO AI_Position_ Chan INT Current valve
position
Range 0 - 1000
13 RO AI_Analog_ Input_1_Chan INT Value of generic
Analog input 1
Range 0 – 100%
14 RO AI_Analog_ Input_2_Chan INT Value of generic
Analog input 2
Range 0 – 100%
15 Get
(V-RO)
AI_Torque_Chan INT Current torque
output
Range 0-120%
16 Get
(V-RO)
DI_Alarms_2_Chan BYTE Battery & power
supply information
Section 4.2.13
17 RO DI_actuator_ Faults_3_Chan BYTE Mechanical and
electrical faults 3
Section 4.2.14
18 Get/Set
(V-RW)
DO_Move_Test_Chan BOOL Move test request 0-no request
1-request move test
19 Get/Set
(V-RW)
AO_Analog_Output_Chan UINT Control of generic
analog output
Range 0-1000%
20 RW CTRL_Status_ Chan BYTE Set the status
associated with
the various control
values
Section 4.2.12
Continued on next page













































