87
CFG – NAV (0x06 0x03)
It’s a poll request. Poll engine settings for navigation. The module will respond the
same message defined below (I/O message).
Header ID Data Length Data Checksum
0xB5 0x62 0x06 0x03 0 None CK_A CK_B
CFG – NAV (0x06 0x03)
It’s an I/O message. Poll and set engine settings for navigation.
Header ID Data Length Data Checksum
0xB5 0x62 0x06 0x03 28 See below CK_A CK_B
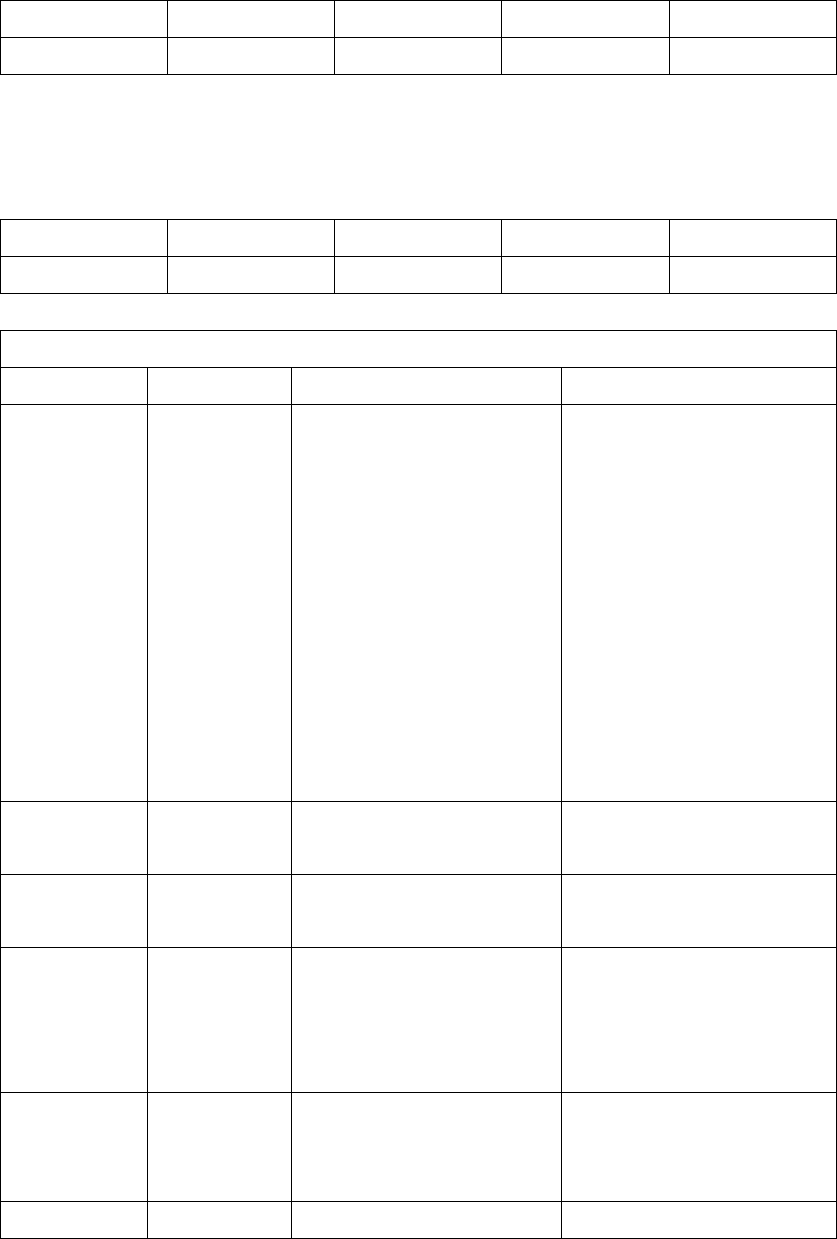
Data
Offset bytes Format Descriptions Notes
0 U1 Kinematic model 1 – stationary
2 – pedestrian
3 – automotive
4 – sea
5 – airborne with acceleration <
1g
6 – airborne with acceleration <
2g
7 – airborne with acceleration <
4g
8 ~ 255 – reserved
1 U1 Minimum number of SVs for
navigation
1 ~ 16
2 U1 Maximum number of SVs for
navigation
1 ~ 16
3 U1 C/N0: conditional lower limit This condition will be applied if
and only if enough satellites (say
5) are being tracked and above
this limit.
4 U1 C/N0: absolute lower limit A satellite with C/N0 below this
limit is not used in the navigation
solution.
5 U1 Minimum elevation for SVs































































































































































